-
豪華私人船,,多設(shè)施,旅行探險
-
快速水上運動艇,多用途
-
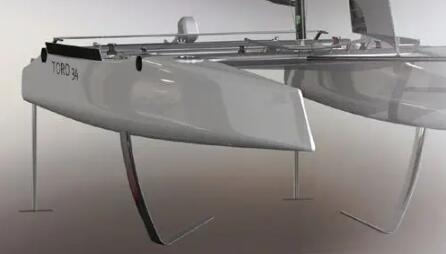
利用風(fēng)力的船,,多種用途
-
設(shè)備多樣,,功能全面
-
多樣刺激,,樂趣無限
-
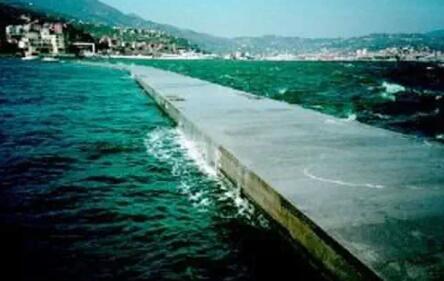
船只停靠的場所,,設(shè)施齊備


















































|
P是比例控制,I 是積分控制,,pid是微分控制,。 |
| 河北女子職業(yè)技術(shù)學(xué)院航海學(xué)院怎么樣,? |
2022-08-16
|
查看詳情 >> |
| 大連船泊重工是國企還是央企啊,? |
2022-08-16
|
查看詳情 >> |
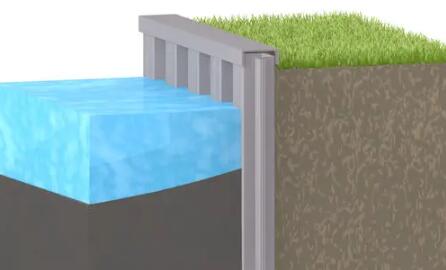
| 船塢是什么東西? |
2022-08-15
|
查看詳情 >> |